



چالشی بزرگ پیش روی خودروهای کاملاً خودران
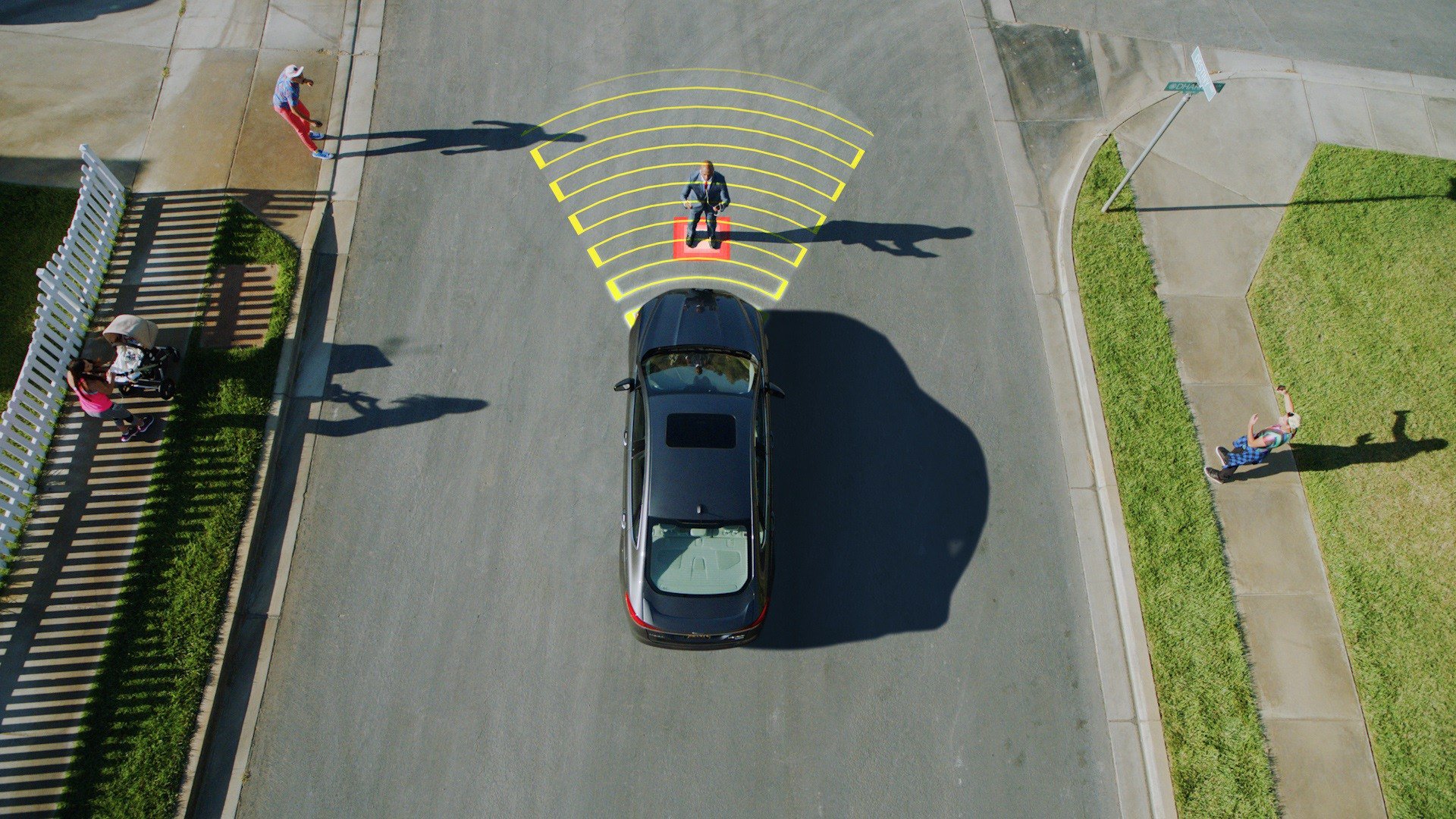
زمانی که بحث عابرین پیاده به میان میآید، متغیرهای بسیاری وجود دارند که باید در نظر گرفته شوند. رانندهها به خوبی این موضوع را میدانند.
ما به عنوان راننده به خوبی میتوانیم تشخیص دهیم که یک شخص چه زمانی میخواهد از خیابان عبور کند یا فقط در کنار خیابان به هیچ دلیلی ایستاده است. ما رفتارهای یک دوچرخه سوار کنار خیابان را میتوانیم پیش بینی کنیم و قادر هستیم حدس بزنیم کسی که در حال دویدن در پیاده رو است چه زمانی به تقاطع رسیده و از خیابان عبور خواهد کرد.
اکنون، مگر این که یک ابرکامپیوتر داشته باشد، احتمال این که یک رایانه بتواند چنین متغیرهایی را مد نظر قرار دهد، حداقل با توجه به وسعت و تفاوت کارهایی که انسانها انجام میدهند و تکنولوژیهای موجود سال ۲۰۱۸ این کار غیر ممکن به نظر میرسد.
هنریک گرین، رئیس بخش تحقیق و توسعه ولوو در این مورد میگوید: «خودروی خودران نمیتوان با دیدن هر عابر پیادهای که کنار خیابان ایستاده متوقف شود. ولی از سوی دیگر، خودروی خودران باید قادر باشد تا در زمان مناسب و هنگامی که عابر پیاده قصد ورود به خیابان دارد توقف نماید.»
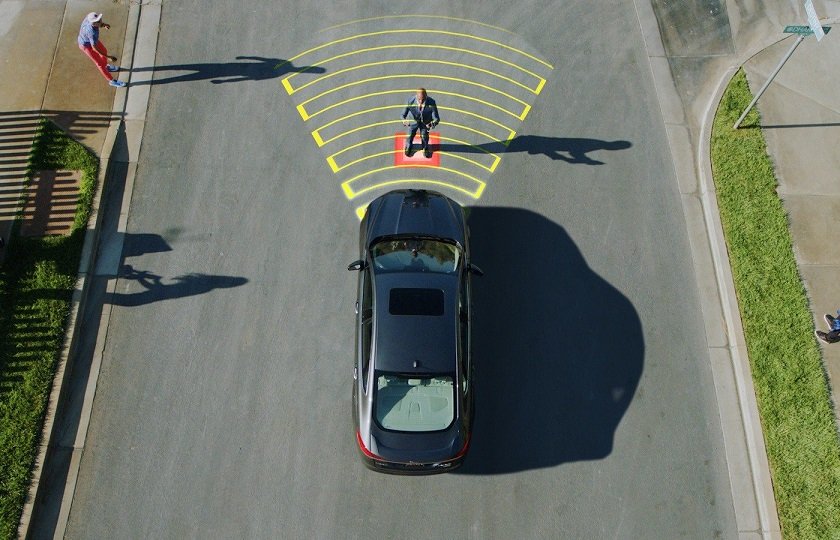
در نمایشگاه امسال خودروی لس آنجلس، ولوو و لومینار از تکنولوژی پیشرفته لیدار خود رونمایی کردند. این تکنولوژی ولوو حتی میتواند نوع ایستادن عابر پیاده و حرکات پای آنها را در محدوده ۲۵۰ متری به خوبی تشخیص دهد.

حتی اگر سنسورها به خوبی بتوانند حرکات را تشخیص دهند، این موضوع به تنهایی برای تشخیص این که نهایتاً چه اتفاقی خواهد افتاد کافی نیست. به عنوان مثال، اگر یک دونده تشخیص داده شود که تا سه ثانیه به تقاطع میرسد، در بهترین حالت خودرو نمیتواند پیش بینی کند که او چه قصدی دارد. این سنسورها در حال حاضر هیچ تسلطی روی صورت عابر پیاده ندارند و نمیتوانند تشخیص دهند که عابر پیاده به خودرو نگاه میکند یا نه. یک نمونه خوب دیگر برای مشکلی بزرگ میتوان عابر پیادهای باشد که وقتی در حال نگاه به گوشی تلفن همراه خود است قصد دارد از خیابان رد شود.
لسلی نوتبوم، هم مؤسس و مدیر طراحی Humanising Autonomy در این باره میگوید: «نکته مهم این است که سیستم بتواند مواردی این چنینی را متوجه بشود و فقط بحث دنبال کردن حرکات کافی نیست.»
به غیر از مهندسان نرم افزار، این شرکت بریتانیایی تیمی از روانشناسهای رفتاری دارند که از طریق تماشای ویدیوهای مختلف به سیستمها کمک میکنند تا چگونه با عابرین پیاده رفتار کنند.
نوتبوم در ادامه گفته: «شما باید مدلهای رفتاری کلی داشته باشید که جزئیات دقیقی دارند و قدم بعدی، متمرکز کردن آنهاست. ما اطلاعات در مورد رفتارهای کلی یک شهر را داریم، سپس میتوانیم به بررسی نقطههای مشخص پرداخته و تشخیص بدهیم عابرین پیاده در یک تقاطع با چراغ راهنمایی یا در حال عبور از خیابان چگونه رفتار میکنند.»
خلاصه کلام این که، سیستمهای خودران نباید به هیچ وجه رفتارهای عابرین پیاده را اشتباه پیش بینی کنند، در غیر این صورت سیستمهای کاملاً خودران امکان واقعی شدن نخواهند داشت.
منبع ترجمه: Cars Coops
لینک های مفید :




دیدگاه بگذارید
اولین نفر باشید که دیدگاه خود را می نویسد